Проект 03 · Thinklab
Robot Manipulator
Командный инженерный проект группы Thinklab. Мы проектируем робота-манипулятора с нуля — от первых эскизов в Fusion 360 до реальных деталей, напечатанных на 3D-принтере Anycubic Kobra 51. Настоящая инженерия, настоящая команда.
Статус проекта
Путь к завершению
15 марта 2026 · Начало
Старт проекта — проектирование в Fusion 360
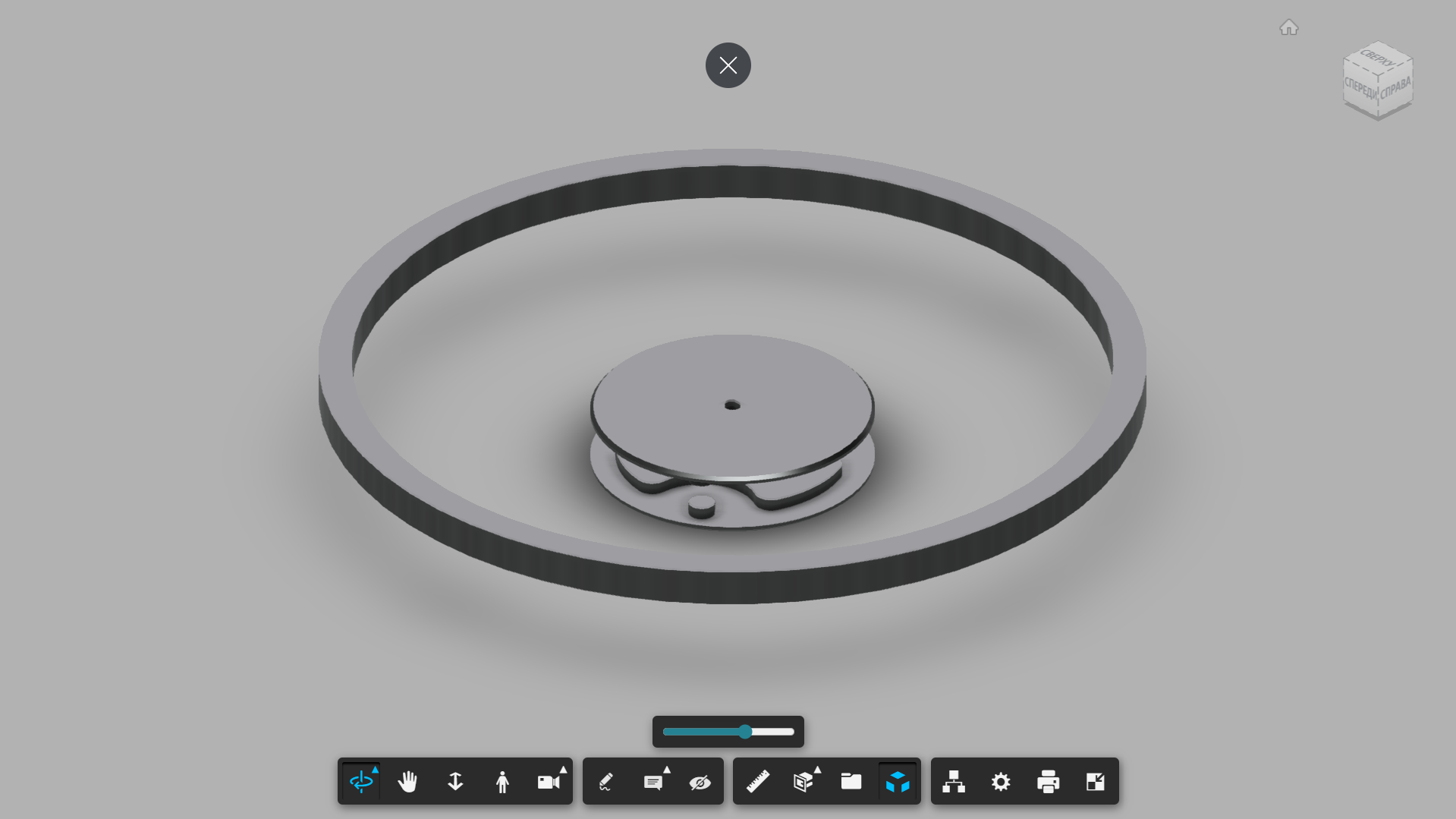
Команда Thinklab начала разработку: первые 3D-модели деталей манипулятора в Fusion 360, расчёт кинематики и распределение задач.
🔧 В процессеАпрель 2026 · Планируется
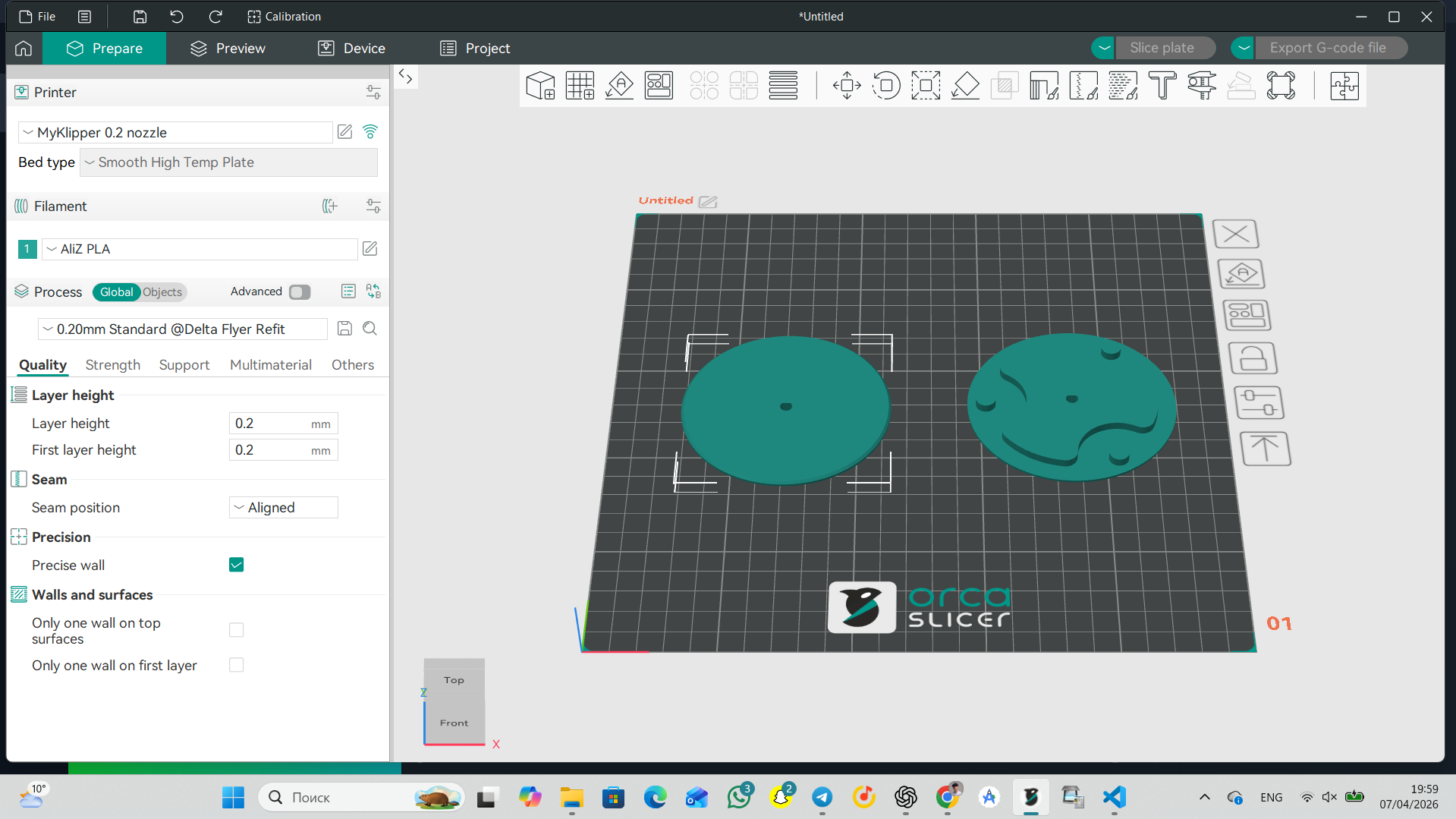
3D-печать деталей на Anycubic Kobra 51
После финализации всех 3D-моделей запускаем печать деталей поочерёдно по компонентам манипулятора.
Апрель–Май 2026 · Планируется
Сборка и программирование
Сборка всех напечатанных деталей, установка сервоприводов и написание управляющей программы.
Начало мая 2026 · Цель
🦾 Готовый робот-манипулятор
Полностью собранный и работающий робот-манипулятор — гордость команды Thinklab!
СкороО проекте
- Все детали проектируются командой в программе Autodesk Fusion 360 — точное 3D-моделирование каждого компонента манипулятора
- Печать деталей на Anycubic Kobra 51 — современный FDM 3D-принтер с высокой точностью и скоростью печати
- Командный проект в рамках инженерно-физической группы Thinklab при Школе «Усмунк» РАУ
- Применяем знания по кинематике, механике и программированию в реальном железном проекте
- Цель — создать функциональный манипулятор, способный выполнять базовые операции захвата и перемещения объектов
Фото проекта
🖼️robot_photo_1.jpg
🖼️robot_photo_2.jpg

🖼️robot_photo_3.jpg

🖼️robot_photo_4.jpg